
Shadertoy is an amazing place to see all sorts of creative shader demos and get inspired. I noticed that most of the shaders there that depict certain 3D geometries - simple or extremely complex - are drawn using raymarching algorithm.
At first the algorithm sounds kind of magical, and the similarity of its name to raytracing keeps me wondering the difference. This time I want to dig deeper about it and get it documented for future reference.
Geometry Construction
Both raymarching and raytracing are algorithms for rendering 3D objects, and no matter how, to render a certain 3D object we need to firstly construct/define its shape.
Explicitly
Generally speaking an explicit geometry is defined with a range of parameterization functions.
For example, for a sphere with center at $(x_0,y_0,z_0)$ and radius $r$:
\[{\begin{aligned}f(x)&=x_{0}+r\sin \varphi \;\cos \theta \\f(y)&=y_{0}+r\sin \varphi \;\sin \theta \qquad (0\leq \varphi \leq \pi ,\;0\leq \theta <2\pi )\\f(z)&=z_{0}+r\cos \varphi \,\end{aligned}}\]However, in raytracing pipeline, geometries are usually defined explicitly with vertices. These vertices form into triangles and then got connected edge by edge to create the final geometries - just like this kind of low poly crafts. This is called geometry polygonization.
Implicitly - SDF
A different approach is to define 3D geometries implicitly with mathematical equations.
For example, any 3D point that satisfies this equation is on the surface of a sphere with radius of 1 unit and origin at $(0, 0, 0)$:
\[f(x, y, z) = \sqrt{x^2 + y^2 + z^2} - 1\]- $f(x, y, z) < 0$, the point is inside the sphere;
- $f(x, y, z) > 0$, the point is outside the sphere;
- $f(x, y, z) = 0$, the point is on the sphere surface.
because the result $f(x, y, z)$ is also the distance between the point and the sphere surface, and the sign of it tells if the point is inside/outside/on the sphere surface, so this function is also called Signed Distance Function (SDF).
Sphere
Code for previous sphere SDF example.
// for sphere with radius r
float sphereSDF(vec3 p, float r) {
return length(p) - r;
}
// for unit sphere with radius r = 1
float sphereSDF(vec3 p) {
return length(p) - 1;
}
Note: The
lengthfunction returns the length of a vector defined by the Euclidean norm, i.e. the square root of the sum of the squared components. The input parameter can be a float scalar or a float vector. In case of a floating scalar thelengthfunction is trivial and returns the absolute value.
Box/Cube
// for box with extends b (length, width, height)
// vec3 d records the distance between p and box surface on 3 axis
float boxSDF(vec3 p, vec3 b)
{
d = abs(p) - b;
return length(max(d,0)) + min(max(d.x,max(d.y,d.z)),0);
}
If d.x < 0, then -d.x < p.x < d.x which means p has coordinate that smaller than the box extend on X axis. Same explanation for y and z coordinates. So if vec3 d has all xyz coordinates less than 0, then p is inside the box.
Note: The
maxfunction returns the larger of the two arguments. The input parameters can be floating scalars or float vectors. In case of float vectors the operation is done component-wise.
For the first part of the return, max(d,0) returns coordinates of d and they will be either bigger than or equal to 0 - which tells that p is outside or on the surface of the box. Then length() calculates how far it is to the surface.
For the second part of the return, min(max(d.x,max(d.y,d.z)),0) compares the largest coordinate of d with 0 and return the smaller one. The result will be either smaller than or equal to 0 - which tells that p is inside or on the surface of the box.
Final result combines both considerations:
// for unit cube, with better annotation
float cubeSDF(vec3 p) {
// If d.x < 0, then -1 < p.x < 1, and same logic applies to p.y, p.z
// So if all components of d are negative, then p is inside the unit cube
vec3 d = abs(p) - vec3(1);
// Assuming p is inside the cube, how far is it from the surface?
// Result will be negative or zero.
float insideDistance = min(max(d.x, max(d.y, d.z)), 0);
// Assuming p is outside the cube, how far is it from the surface?
// Result will be positive or zero.
float outsideDistance = length(max(d, 0));
return insideDistance + outsideDistance;
}
More SDF examples
Inigo Quilez’s blog post - distance functions
Raymarching Algorithm
Now we can describe 3D objects using SDF which returns signed distance between any point and 3D surface. To render them we will be using raymarching algorithm. From here I’m mainly citing Jamie Wong’s amazing blog post - Ray Marching and Signed Distance Functions.
Just as in raytracing, we select a position for the camera, put a grid in front of it, send rays from the camera through each point in the grid, with each grid point corresponding to a pixel in the output image.

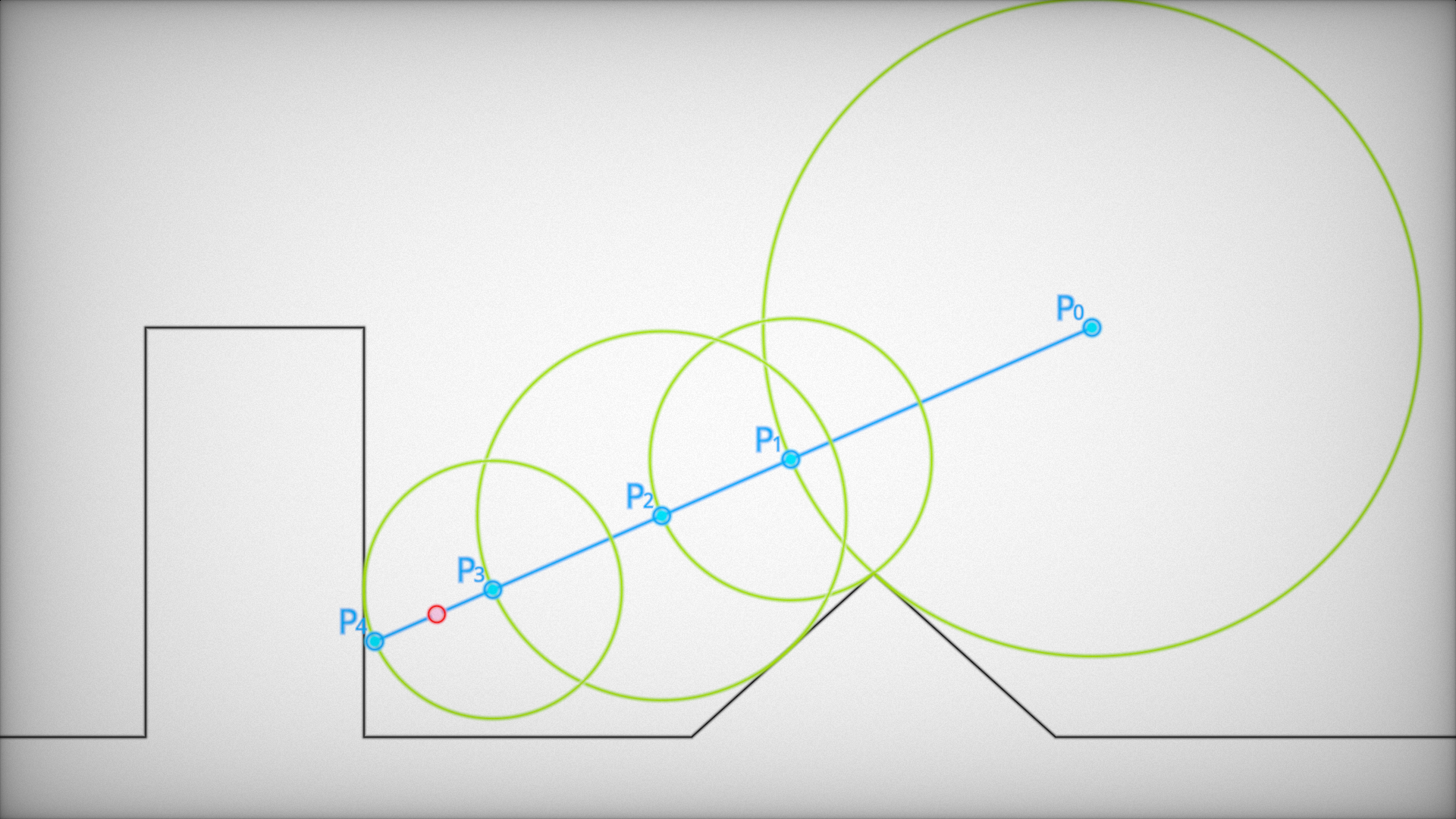
In raymarching, to find the intersection between the view ray and the scene, we start at the camera, and move a point along the view ray, bit by bit. At each step, we ask “Is this point inside the scene surface?”, or alternately phrased, “Does the SDF evaluate to a negative number at this point?”. If it does, we’re done! We hit something. If it’s not, we keep going up to some maximum number of steps along the ray.
We could just step along a very small increment of the view ray every time, but we can do much better than this (both in terms of speed and in terms of accuracy) using “sphere tracing”.
GLSL code implementation for raymartching algorithm:
eye: the eye/camera position, acting as the ray originmarchingDirection: the normalized ray direction to march instart: the starting distance away from the eye/cameraend: the max distance away from the eye/camera to march before giving up
/**
* Return the shortest distance from the eyepoint to the scene surface along
* the marching direction. If no part of the surface is found between start and end,
* return end.
*/
float shortestDistanceToSurface(vec3 eye, vec3 marchingDirection, float start, float end) {
float depth = start;
for (int i = 0; i < MAX_MARCHING_STEPS; i++) {
float dist = sceneSDF(eye + depth * marchingDirection);
if (dist < EPSILON) {
return depth;
}
depth += dist;
if (depth >= end) {
return end;
}
}
return end;
}
Amazing interactive tutorial
Rendering
const int MAX_MARCHING_STEPS = 255;
const float MIN_DIST = 0.0;
const float MAX_DIST = 100.0;
float EPSILON = 0.0001;
struct Ray{
vec3 origin;
vec3 direction;
};
float SphereSDF(vec3 samplePoint) {
return length(samplePoint) - 1.;
}
float ShortestDistanceToSurface(Ray ray, float start, float end) {
float depth = start;
for (int i = 0; i < MAX_MARCHING_STEPS; i++) {
float dist = SphereSDF(ray.origin + depth * ray.direction);
if (dist < EPSILON) {
return depth;
}
depth += dist;
if (depth >= end) {
return end;
}
}
return end;
}
void mainImage( out vec4 fragColor, in vec2 fragCoord )
{
// Scale and bias uv
// [0.0, iResolution.x] -> [0.0, 1.0]
// [0.0, 1.0] -> [-1.0, 1.0]
vec2 xy = fragCoord / iResolution.xy;
xy = xy * 2.- vec2(1.);
xy.x *= iResolution.x/iResolution.y;
// SphereSDF position at (0,0,0)
vec3 pixelPos = vec3(xy, 2.); // Image plane at (0,0,2)
vec3 eyePos = vec3(0.,0.,5.); // Camera position at (0,0,5)
vec3 rayDir = normalize(pixelPos - eyePos);
float dist = shortestDistanceToSurface(eyePos, rayDir, MIN_DIST, MAX_DIST);
// Didn't hit anything
if (dist > MAX_DIST - EPSILON) {
fragColor = vec4(0.0, 0.0, 0.0, 0.0);
return;
}
// Hit on the surface
fragColor = vec4(1.0);
}
Raymartching vs Raytracing
The main difference is the function float RaySphereIntersection(Ray ray, Sphere sphere). Explanation see previous post –> Raytracing - Ray Sphere Intersection
struct Ray{
vec3 origin;
vec3 direction;
};
struct Sphere{
vec3 center;
float radius;
};
float RaySphereIntersection(Ray ray, Sphere sphere){
vec3 oc = ray.origin - sphere.center;
float a = dot(ray.direction, ray.direction);
float b = 2.*dot(oc,ray.direction);
float c = dot(oc,oc)-sphere.radius*sphere.radius;
float discriminant = b*b-4.*a*c;
if(discriminant<0.)
return -1.;
else
return (-b-sqrt(discriminant))/(2.*a);
}
void mainImage( out vec4 fragColor, in vec2 fragCoord )
{
// Scale and bias uv
// [0.0, iResolution.x] -> [0.0, 1.0]
// [0.0, 1.0] -> [-1.0, 1.0]
vec2 xy = fragCoord / iResolution.xy;
xy = xy * 2.- vec2(1.);
xy.x *= iResolution.x/iResolution.y;
Sphere sphere = Sphere(vec3(0.), 1.0); // Sphere position at (0,0,0)
vec3 pixelPos = vec3(xy, 2.); // Image plane at (0,0,2)
vec3 eyePos = vec3(0.,0.,5.); // Camera position at (0,0,5)
vec3 rayDir = normalize(pixelPos - eyePos);
float dist = RaySphereIntersection(Ray(eyePos, rayDir), sphere);
// Didn't hit anything
if (dist < 0.) {
fragColor = vec4(0.);
return;
}
// Hit on the surface
fragColor = vec4(1.,0.,0.,1.);
}